CARSMOS (meaning Cars Mobility Operating System), as a smart travel project group based on the Open Atom Open Source Foundation, aims to provide a technologically advanced, standard and open source platform to solve problems in smart car research, education and industrial cooperation. Platform closure and fragmentation issues. This program includes contributions, sponsorship and participation from industry, academia and research.
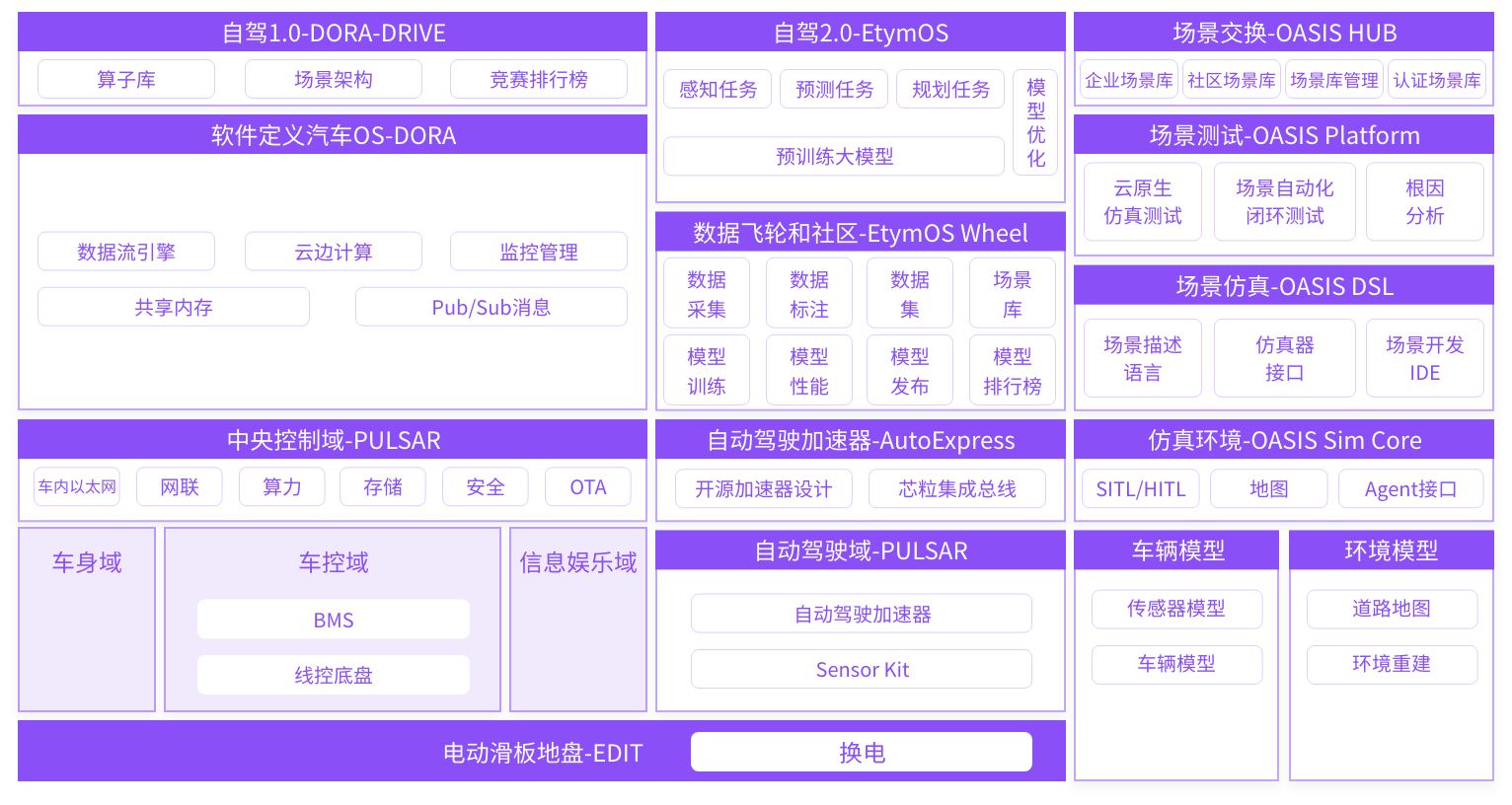
EDIT EV Low Speed Electric Skateboard Chassis
PULSAR Open Electrical and Electronic Architecture
AutoExpress Chip Interconnect Technology and Agile DSA Chip Design Standards
DORA data flow middleware and SDV (software defined vehicle) business development platform
EtymOS self-driving large model and data flywheel platform
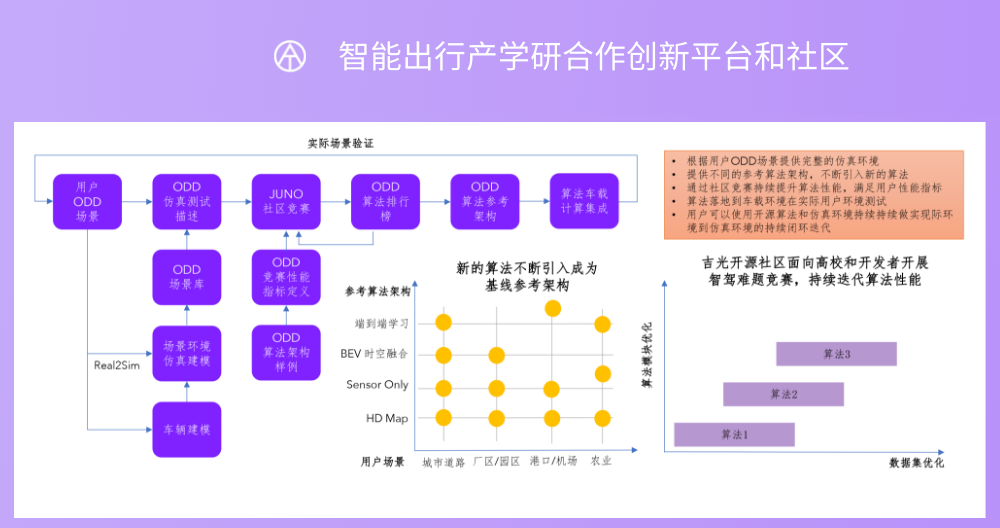
OASIS Scene Description Language and Simulation Test Platform
The open source software part adopts Apache 2.0, which is compatible with the Mulan loose license v2 (MulanPSLv2), and the open source hardware part adopts the CERN-OHL-W-2.0 protocol.
We look forward to using these unified platform technologies to serve the basic needs of smart car education and scientific research in college education and scientific research, and also become a platform for dialogue with the industry, so that education and research can closely match the needs of the industry, and accelerate the transfer of research results to the industry landing speed.
 Open source smart travel research/education/
Open source smart travel research/education/