OASIS-smart driving simulation platform and scene description language

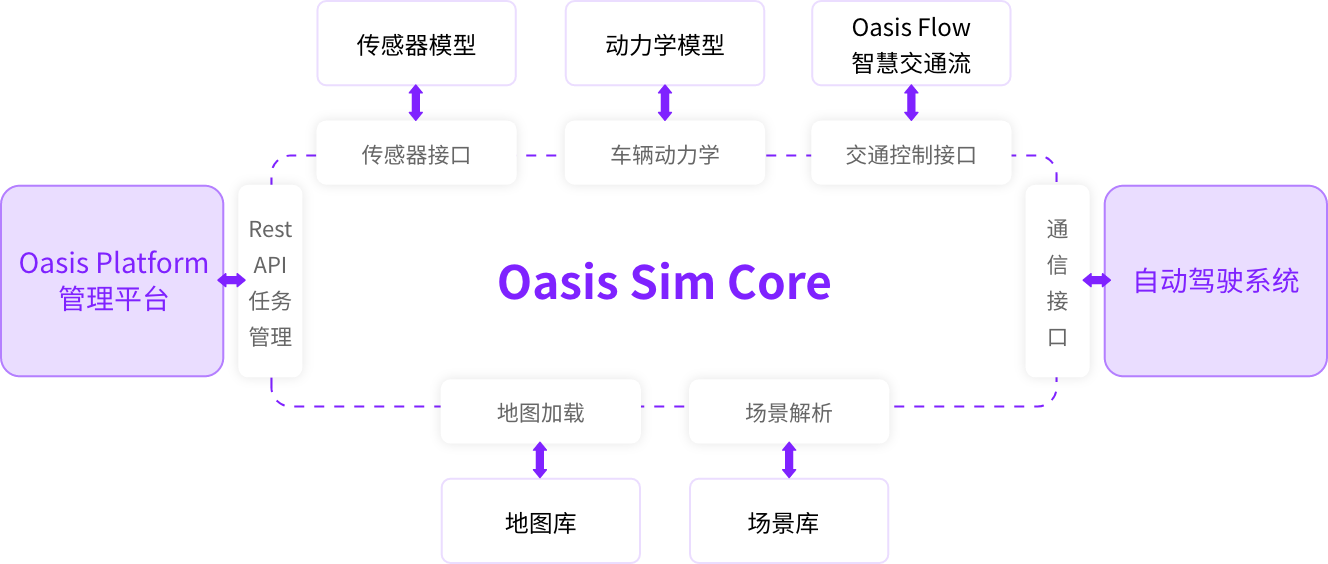
The simulation test platform and its ecology developed by OASIS in the form of open source are expected to connect the three parties of scientific research, supervision and industry, promote the growth and transformation of intelligent driving R&D enterprises. OASIS Sim is positioned as an open simulation platform, which realizes the key functions of simulation in the form of minimal organization. OASIS Sim and other open source projects in Carsmos form a complete intelligent driving research and development tool chain, which lowers the research and development threshold and improves the freedom and maintainability of research and development. OASIS DSL is a set of formal domain-specific language for dynamic traffic scene description,which has the advantages of the above formal language. The OASIS DSL open source project provides syntax design,domain model and language implementation on the OASIS Sim simulation platform, including an interactive scene editor based on OASIS DSL.
Technical value
Self-designed scene language and compiler, one of only two open source scene languages in the world. Compatible with OpenScenario 1 & 2 semantics, and supports OpenScenario's simulation ecology. It integrates formal rule description and testing, scenario description and testing. The web-based scene library IDE based on the vena scene language and the scene simulation environment deployed in cloud native mode support the closed loop from scene construction to scene test. The scenario language Spec of the Apache 2.0 license is compatible with the OpenScenario 2.0 standard and allows third-party language implementations.
Business value
Based on the implementation of open source scene language, complete open source simulation environment docking, open source scene library design IDE and deployment tools, to meet the characteristics of research, supervision, industry common use and evolution scene language.
Ecological value
Through the national standard scene description language and scene library, an autonomous and controllable robot and automatic driving simulation test ecology is formed.